Новый подход к планированию управления роботов в условиях неопределенности
Большинство роботов первоначально тестируются в лабораторных условиях и других контролируемых средах, они предназначены для использования в реальных условиях, помогая людям решать различные проблемы. Навигация в реальных условиях сопряжена с высоким уровнем неопределенности и непредсказуемости, особенно когда роботы выполняют миссии в команде.
Недавно была представлена новая структура, предназначенная для планирования действий роботов в команде, а также с учетом неопределенности, в условиях которой они работают.
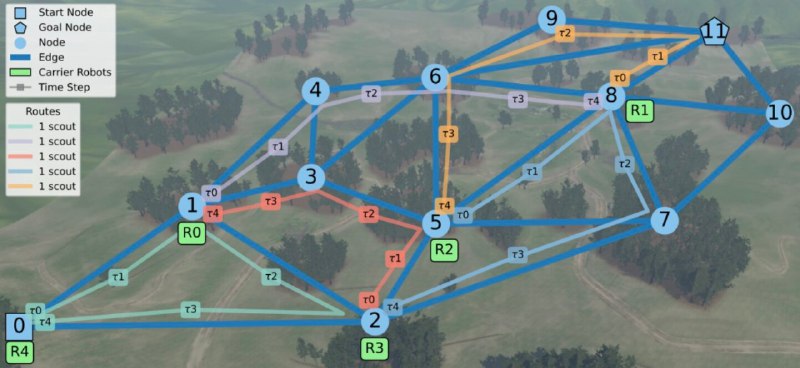
Новый подход, применим к сценариям, в которых разные роботы в команде могут выполнять разные роли, поскольку все роботы коллективно работают над выполнением общей миссии в открытом простраснстве. По сути, разработчики представилт идею о том, что некоторые роботы, которые движутся с более высокими скоростями, могли бы выступать в качестве разведчиков во время данной миссии в реальном мире, патрулируя неизвестные или неопределенные географические регионы впереди, чтобы выявить потенциальные проблемы и лучше спланировать действия всех остальных роботов.
Метод планирования действий команд роботов, основан на двух основных подходах к программированию, а именно над созданием динамического топологического графа и так называемого смешанного целочисленного программирования. Подход команды предполагает использование двух различных типов роботов. Первому типу поручено выполнять миссии, в то время как второй исследует окружающую среду для сбора данных и уменьшения неопределенности, облегчая выполнение задачи.
@robotyai
Большинство роботов первоначально тестируются в лабораторных условиях и других контролируемых средах, они предназначены для использования в реальных условиях, помогая людям решать различные проблемы. Навигация в реальных условиях сопряжена с высоким уровнем неопределенности и непредсказуемости, особенно когда роботы выполняют миссии в команде.
Недавно была представлена новая структура, предназначенная для планирования действий роботов в команде, а также с учетом неопределенности, в условиях которой они работают.
Новый подход, применим к сценариям, в которых разные роботы в команде могут выполнять разные роли, поскольку все роботы коллективно работают над выполнением общей миссии в открытом простраснстве. По сути, разработчики представилт идею о том, что некоторые роботы, которые движутся с более высокими скоростями, могли бы выступать в качестве разведчиков во время данной миссии в реальном мире, патрулируя неизвестные или неопределенные географические регионы впереди, чтобы выявить потенциальные проблемы и лучше спланировать действия всех остальных роботов.
Метод планирования действий команд роботов, основан на двух основных подходах к программированию, а именно над созданием динамического топологического графа и так называемого смешанного целочисленного программирования. Подход команды предполагает использование двух различных типов роботов. Первому типу поручено выполнять миссии, в то время как второй исследует окружающую среду для сбора данных и уменьшения неопределенности, облегчая выполнение задачи.
@robotyai