ТГХаб
Каналы
gonzo-обзоры ML статей
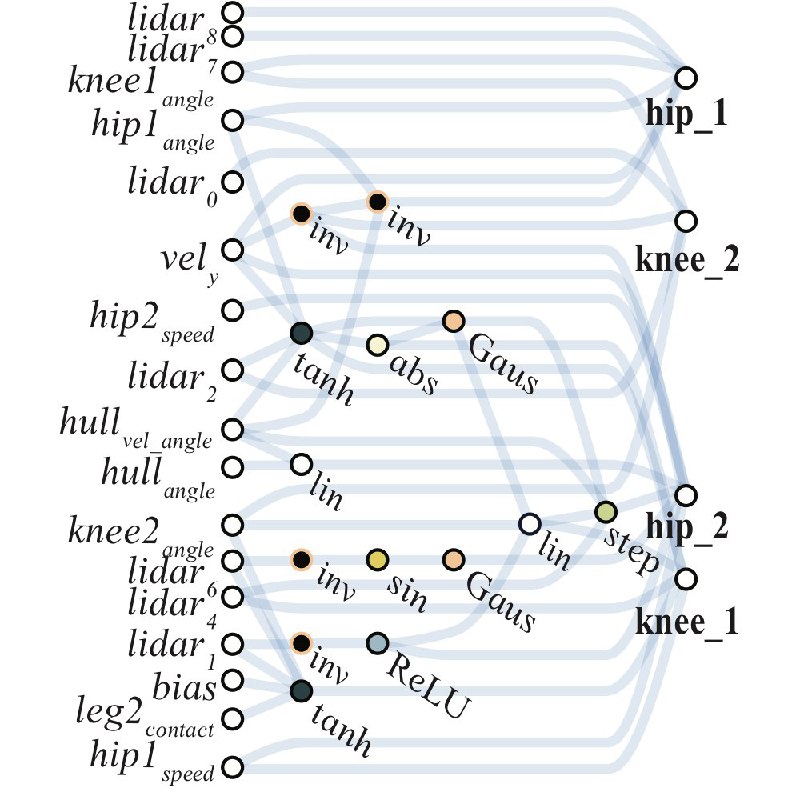
A minimal architecture discovered in earlier generations that is still capable of controlling the Bipedal Walker to walk forward, despite not achieving an excellent score.